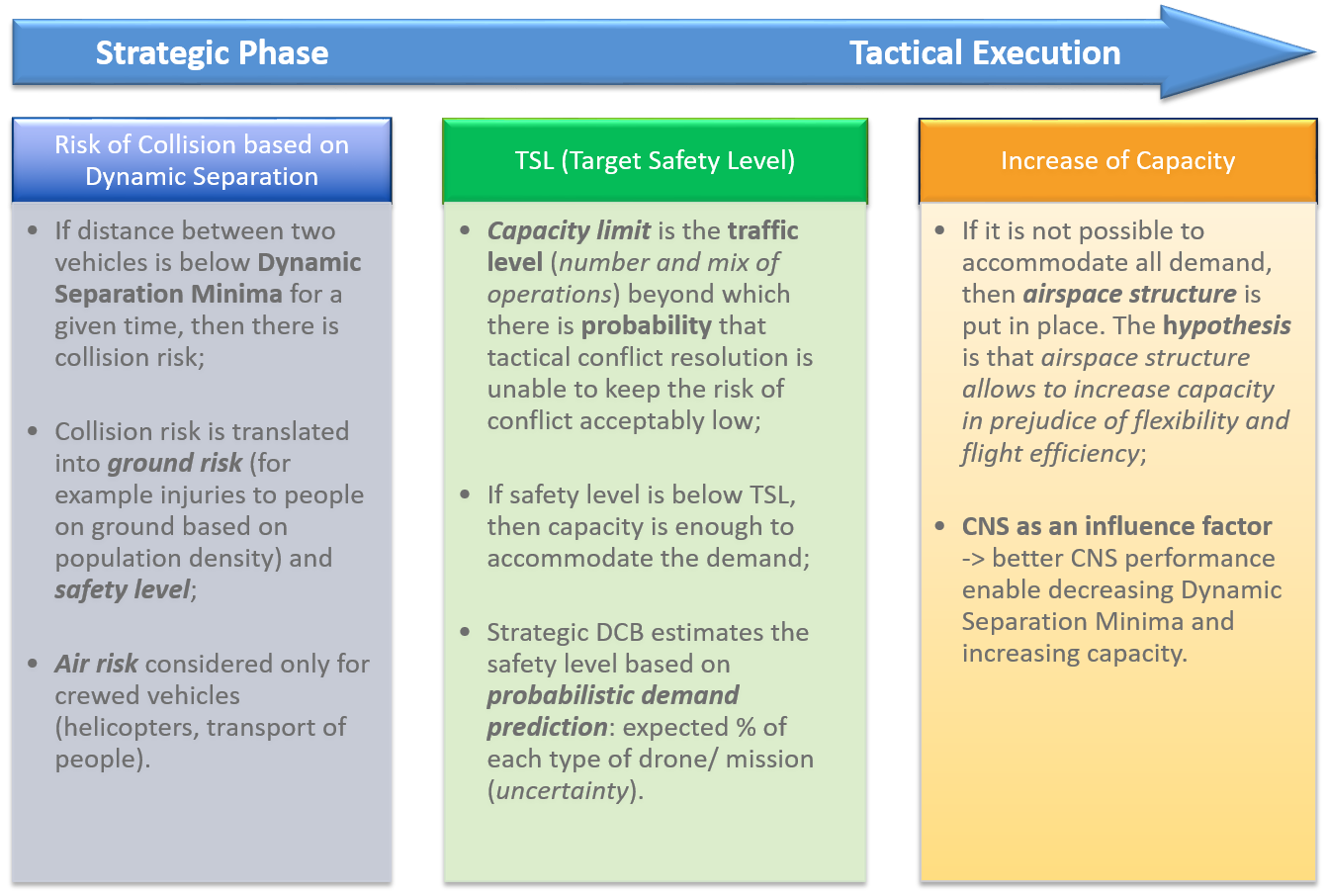
Separation between a given pair of drones is considered a safety barrier enabling operations in a given area of airspace. Therefore, separation management enables the safe accommodation of demand in a given airpace. Since drone operations are characterised for the diversity of performance, they require an approach to separation management flexible and adapted to the dynamic nature of CNS performance.